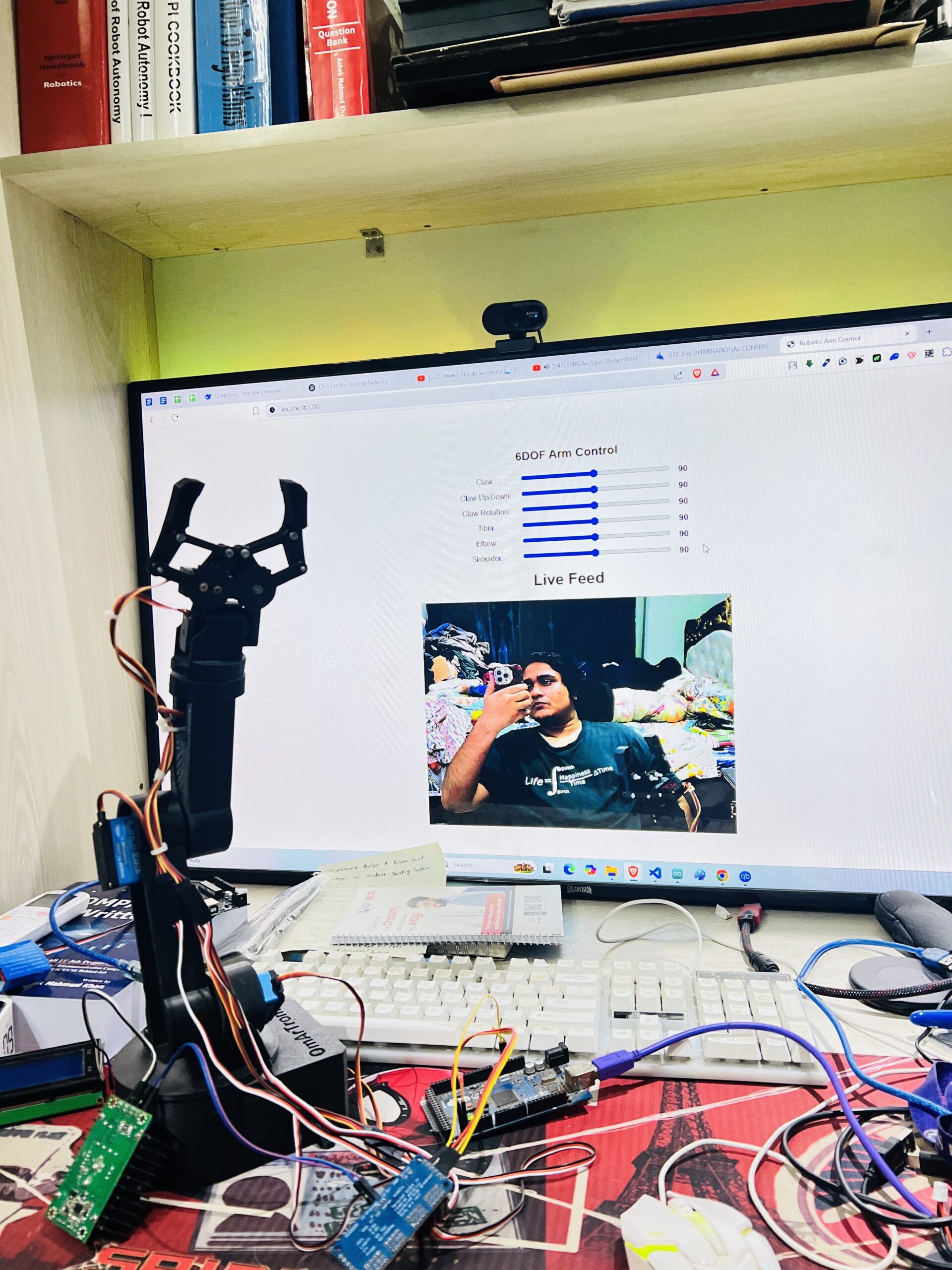
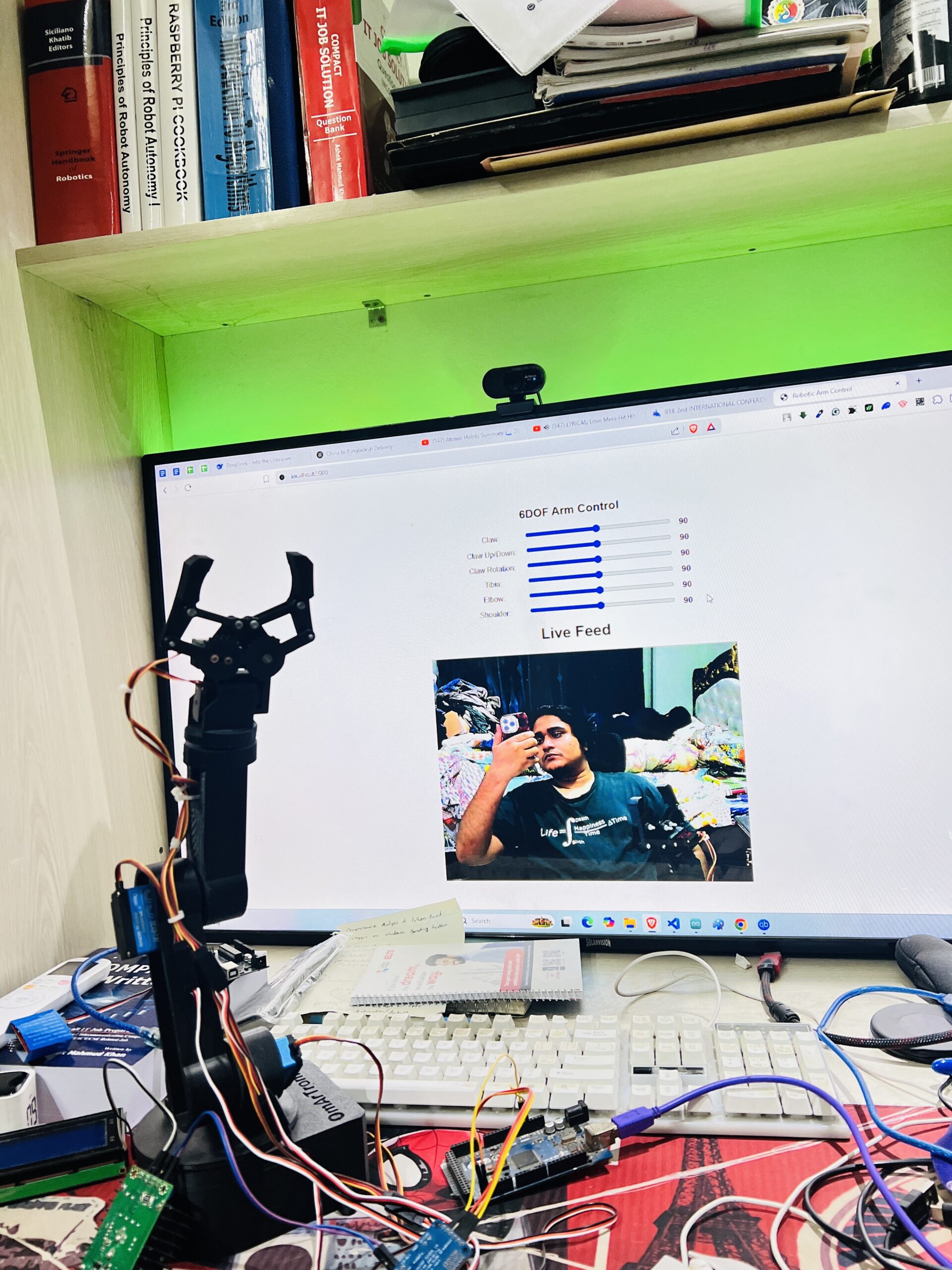
6DOF Robotic Arm (Web Control + Joystick Control + Gesture Control) [ongoing]
This project demonstrates a 6-degree-of-freedom robotic arm controlled through a custom-built Flask web server. The system allows real-time motor control via a user-friendly interface and integrates a live camera feed from a top-mounted webcam for monitoring and future object tracking.
🔧 Key Features:
6DOF Arm Control: Control each servo channel individually through HTTP requests.
Flask Backend: Python-based server handling commands and serial communication with the microcontroller (Arduino).
Live Video Stream: Top-down webcam stream using OpenCV and MJPEG, embedded directly in the web UI.
Serial Communication: Real-time angle control via USB serial link.
Fun Extras: Includes test sessions, UI bloopers, and physical mishaps (like the arm collapsing mid-operation 😄).